





LDO Orbiter V2.0 Extruder
Original price was: $139.90.$115.00Current price is: $115.00.
One of the most expected project of 2022, the Orbiter v2.0
Only 1 left in stock
The new Orbiter v2.0 shares its concept design with the Orbiter v1.0 and 1.5 but it has been completely redesigned from scratch, improving every possible aspect we could think of.
Many new and improved design features:
- Shorter hardened drive gears 11mm vs 15mm manufactured by Bondtech
- Weight reduced to ~135 grams
- Smaller more compact dimensions (11.6% shorter)
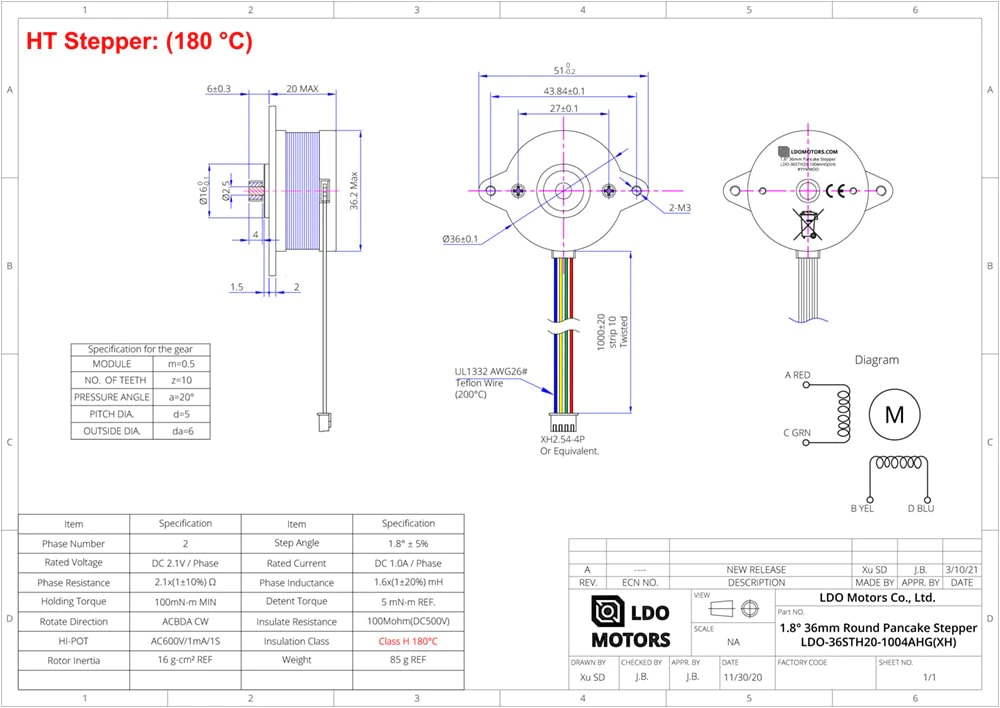
- New motor design offers ~40% increase in extrusion force in real printing conditions and much improved acceleration performance
- Flipped drive gears – filament path closer to the extruder center for a more balanced design and perfect fit on delta printers as well
- Stainless steel filament exit guide with 0.2-0.3mm clearance to drive gears for best TPU printing experience and extreme wear resistance when using abrasive filaments.
- High temperature resistant housings, GPA12
- Machined PEEK secondary drive gear sleeve
- Tension mechanism with grab screw design
- Mounting screws in line with filament exit path – improving housing stiffness and easier mounting
- Perfectly aligned filament path
- New smaller and more stylish PTFE tube input coupler
- Motor position rotated by additional 10 degrees for easier maintenance and assembly
- Extremely low backlash ~0.06mm
- Filament sensor add on with auto load and unload button add on feature
- And many more small changes to improve mechanical accuracy and design look
Description
High precision direct drive extruder using custom made parts, manufactured by LDO Motors.
This is our finest direct drive extruder system in which LDO has integrated all what they learned about extruders in the past years.
PDF Download for more information
* The extruder itself without filament can handle acceleration up to 25000mm/s2. Adding weight of the filament it drags along its recommended to have acceleration limit set not above 8000mm/s2. To reduce clicking noise of the extruder (due to fast direction change) you may limit acceleration to 3000mm/s2
Reprap Configuration (Duet)
M350 E16 I1 ;micro stepping set to 16 with interpolation
M92 E690 ;steps/mm – you may need to finetune it
M203 E7200 ;max speed mm/min
M566 E300 ;instantaneous speed change mm/min
M201 E3000 ;acceleration mm/s2
M906 E1200 I10 ;motor current 1.2A idle current 10%
M572 D0 S0.02 ;pressure advance – to be calibrated
M207 S1.5 F7200 Z0.2 ;firmware retraction
Klipper Configuration
[extruder] microsteps: 16
full_steps_per_rotation: 200
rotation_distance: 4.637
nozzle_diameter: x.xx #define nozzle diameter
filament_diameter: 1.750
max_extrude_only_distance: 500
max_extrude_only_velocity: 120
pressure_advance: 0.025 #to be calibrated
pressure_advance_smooth_time: 0.03 #to be calibrated
[tmc2208 extruder] interpolate: true
run_current: 0.85 #**
hold_current: 0.100
sense_resistor: 0.11 #**
stealthchop_threshold: 0
driver_TBL: 0
driver_HEND: 6
driver_HSTRT: 7
driver_TOFF: 4
**Very important note!!!
Please make sure the sense resistor is set according to what you have on board.
TMC2130, TMC2208 and TMS2209 usually have 0.11Ω
TMC2660 have 0.051Ω
TMC5160 have usually 0.075Ω.
As an example, if you set by mistake the sense resistor to 0.11Ω instead of 0.051Ω the real current of the motor will be more than double, and the power injected in the motor more than four time higher, yes you read it correctly FOUR – AKA 4 times higher. 0.85A shall give a power loss of about 3.5W doubling the current will lead to >14W – this will melt all the plastic gearset before you even notice something is wrong!
How you can identify the sense resistor? It’s pretty easy, look for two identical resistors which are bigger than all the others onboard or around the stepper driver. See the examples in the next pictures.
Resistor marking examples:
R110 means 0.11Ω
R075 means 0.075Ω
R051 means 0.051Ω
Initial setup and test:
Set the current to a very low level 0.1-0.2A. Command extrusion, you should see the extruder turns but it skips steps very easy. This means you are tingling the right configuration, then set it to what it should be and check motor temperature, should not exceed 75°C at room temperature. If yes you might have misconfigured something (shunt / sense resistor) causing higher motor current than you think you’ve set.
Marlin Configuration:
There are two ways to configure Marlin for the Orbiter extruder.
1) Send configuration commands via user interface and save them to EEPROM.
2) Edit and change Marlin configuration files: Configuration.h and Configuration_adv.h recompile and reflash your microcontroller firmware.
Send the following commands via USB:
M350 E16 ;micro stepping set to 16
M92 E690 ;steps/mm – you may need to finetune it
M201 E3000 ;acceleration mm/s2
M203 E120 ;max speed mm/s
M205 E5 ;E jerk mm/s
M906 T0 E850 ;TMC motor RMS current in mA
M900 T0 K0.22 L0.02 ;linear advance values to be calibrated
M207 S1.5 F7200 Z0.2 ;firmware retraction
M500 ;save settings to EEPROM
More info:
https://www.thingiverse.com/thing:4725897
| Weight | 0.5 kg |
|---|---|
| Dimensions | 15 × 15 × 10 cm |
| Brand |
Related products
 Add to cart DetailsBuy Now
Add to cart DetailsBuy NowThis is a super big boy, made for the highest speed of speedy applications. This motor comes with a 1 meter wire terminated with a 4 pin JST-XH connector. We carry these in AH (high temp). Ideal for use as XY motors on a CoreXY printer.
- Select options This product has multiple variants. The options may be chosen on the product page Details
1M/2M Four-lead motor connector XH2.54 white terminal 4pin-6pin
- Add to cart DetailsBuy Now
This is a complete motor set for the Voron 2.4 by LDO motors. These are great motors, and include Voron branding.
- Add to cart DetailsBuy Now
New motor design. Extruder Motor stays much cooler during printing. NOT suited for x and y axis. COOL POWER stepper motor. Compatible with PRUSA MK3 extruder motor.




Reviews
There are no reviews yet.